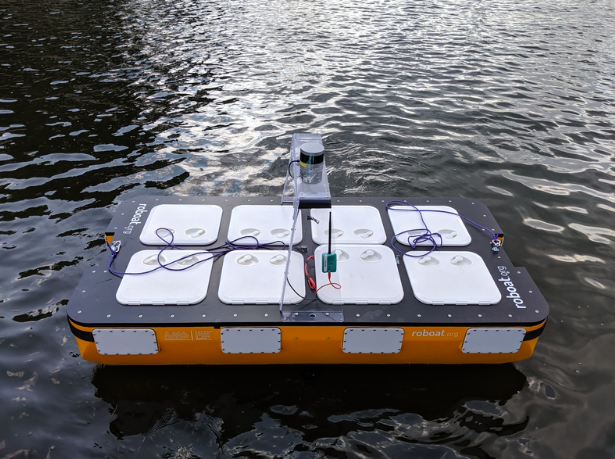
Roboat II might not look like much but it’s bristling with technology which could usher in a new era of autonomous marine craft. Its developers hope this could pave the way for passenger transport and also useful tasks like rubbish collection.
It’s the latest iteration in a project overseen by MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL). MIT Professor Daniela Rus explained, “Roboat II navigates autonomously using algorithms similar to those used by self-driving cars, but now adapted for water. We’re developing fleets of Roboats that can deliver people and goods, and connect with other Roboats to form a range of autonomous platforms to enable water activities.”
On a recent trip, Roboat II autonomously navigated the canals of Amsterdam for three hours collecting data, and returned back to its start location with an error margin of only 0.17cm. This location data is a key part of the trial, as MIT professor Carlo Ratti noted, “Current cooperative algorithms have rarely considered dynamic systems on the water. Cooperative transport, using a team of water vehicles, poses unique challenges not encountered in aerial or ground vehicles. For example, inertia and load of the vehicles become more significant factors that make the system harder to control. Our study investigates the cooperative control of the surface vehicles and validates the algorithm on that.”
It uses a new algorithm for Simultaneous Localisation and Mapping (SLAM), a model-based optimal controller dubbed the nonlinear model predictive controller, and an optimisation-based state estimator, called moving horizon estimation. It uses this in collaboration with lidar, GPS and an inertial measurement unit for location and velocity to plan its routes. The team believe refining these key algorithms will be crucial of the success of autonomy on water.
At 2m long, this is a half-sized prototype. This next step will be the completion of a 4m long vessel designed to ferry 4-6 passengers.
• Hovercraft are a good candidate for autonomy - read about the thoughts of Mark Downer, engineering director at Griffon Hoverwork here.